
Autosubs
Автономные подводные аппараты (AUV) - это подводные лодки-роботы, которые используются для исследования Мирового океана без пилота или какой-либо привязи.
Перед запуском с исследовательского корабля компьютеры AUV запрограммированы с инструкциями, куда идти, что измерять и на какую глубину идти. Без связи с материнским кораблем вся связь с AUV ограничивается использованием акустики (звука), когда AUV находится под водой (обычно это расстояние составляет несколько километров), или спутниковой связи (такой как Iridium), когда AUV плавающие на поверхности моря.
В течение многих лет NOC разрабатывает линейку AUV Autosub, первые миссии в 1997 году. Вы можете прочитать о история развития автосуб.
Энергоснабжение двигательной установки и датчиков является проблемой для AUV. Без подачи кислорода из атмосферы двигатели внутреннего сгорания не практичны. Скорее, AUV должен полагаться на батареи. Поскольку количество энергии, которое можно получить от 1 кг лучших батарей, примерно в десять раз меньше, чем у того же количества дизельного топлива, в настоящее время AUV ограничены по дальности и скорости по сравнению с надводными судами. Поскольку требуемая движущая сила очень быстро увеличивается с рабочей скоростью (приблизительно пропорциональной кубу скорости), решение для Autosub обычно заключается в медленном движении для обеспечения достаточного диапазона. Текущие AUV Autosub работают приблизительно в 1.7 мс-1 (надводные корабли обычно работают в диапазоне от 5 до 10 мс-1).
Точная навигация также является проблемой для AUV. На поверхности моря AUV можно позиционировать с использованием спутниковых систем глобального позиционирования (GPS), однако спутниковые сигналы не способны проникать даже через несколько верхних миллиметров океана, и поэтому для навигации по AUV необходимы другие средства, когда они нырнул Автоподзаводы AUV полагаются главным образом на подход, известный как мертвый расчет; AUV отрывают звук от морского дна, и, измеряя доплеровское смещение эхосигналов, они могут измерить свою скорость относительно морского дна. Для точного расчета, AUV также должен точно определять направление. В Autosub AUV используется волоконно-оптический гироскопический датчик, обеспечивающий точность курса более 0,1 градуса. В целом, точность погрешности около одного метра на каждый пройденный километр достижима. Точность навигации имеет решающее значение для многих съемочных миссий, и, следовательно, NOC исследуют и разрабатывают методы для дальнейшего улучшения этих показателей.
NOC эксплуатирует четыре AUV: Autosub6000 и три автомобиля Autosub Long Range. Программа Oceanids разрабатывает еще четыре AUV Autosub, каждый из которых имеет свои уникальные и специфические преимущества.
Autosub 6000
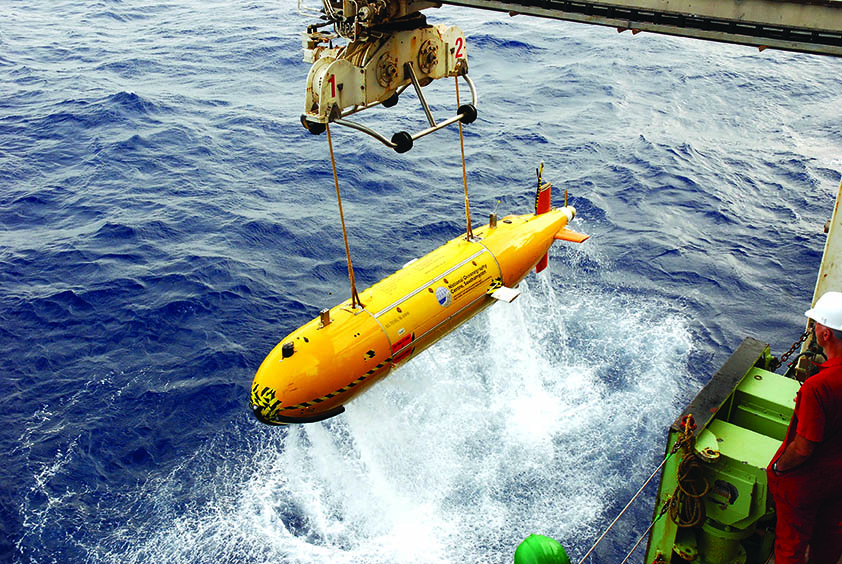 Autosub6000 был разработан для работы в экстремальных условиях, на глубинах океанов, на глубине 6000 м, где давление дробления в 600 раз выше, чем на поверхности.
Autosub6000 был разработан для работы в экстремальных условиях, на глубинах океанов, на глубине 6000 м, где давление дробления в 600 раз выше, чем на поверхности.
После первых испытаний в 2007 году Autosub6000 претерпел значительные изменения. Летом 2008 года он предпринял свои первые научные миссии, исследуя глубоководные размыва на глубине западной части Западной Европы с помощью многолучевого сонара.
В октябре 2009 года AUV завершил успешные испытания на рабочей глубине 5600 м и испытал новую систему предотвращения препятствий, основанную на сканирующем гидролокаторе, над пересеченной местностью подводной горы Касабланки. Это было эффективно использовано в начале 2010 года. RRS Джеймс Кук, где AUV имел решающее значение для усилий по поиску и определению местоположения двух гидротермальных участков вентиляции в районе среднего подъема Каймана в Карибском море.
Одна из инновационных особенностей Autosub6000 заключается в том, что, в отличие от более раннего Autosub3, он не использует сосуды с высоким давлением для защиты батарей от внешнего давления. Скорее он использует батареи, которые мы специально разработали, которые могут сами противостоять давлению на глубине 6000 метров. Они встроены в вырезы в вспененной пене (синтаксической пене), которая составляет центральную часть AUV.
Autosub Long Range
 AUV Autosub Long Range (или Autosub LR) - это новый тип AUV с номинальной глубиной 6000 м. Несмотря на то, что вес AUV Autosub3 и Autosub6000 составляет треть веса, он способен преодолевать расстояния, превышающие расстояние в десять раз, и может быть развернут более чем в сто раз.
AUV Autosub Long Range (или Autosub LR) - это новый тип AUV с номинальной глубиной 6000 м. Несмотря на то, что вес AUV Autosub3 и Autosub6000 составляет треть веса, он способен преодолевать расстояния, превышающие расстояние в десять раз, и может быть развернут более чем в сто раз.
Ключом к достижению этой производительности является эффективное движение на медленной скорости (при 0,4 мс − 1), и при строгом контроле мощности, используемой датчиками AUV и системами управления. Одной из областей, в которой последние достижения в технологии помогли сделать это возможным, была разработка микропроцессоров для таких устройств, как мобильные телефоны, которые имеют достаточную вычислительную мощность, но потребляют очень мало энергии.
Имея дальность 2000 км и рейтинг глубины 6000 м, этот AUV очень полезен океанографам при проведении измерений свойств океана и морского дна в масштабах океана и без необходимости в исследовательском судне. AUV периодически всплывает и передает данные ученым через спутниковую линию передачи данных Iridium.
Autosub3
Autosub3 был удален и больше не доступен через NMEP.
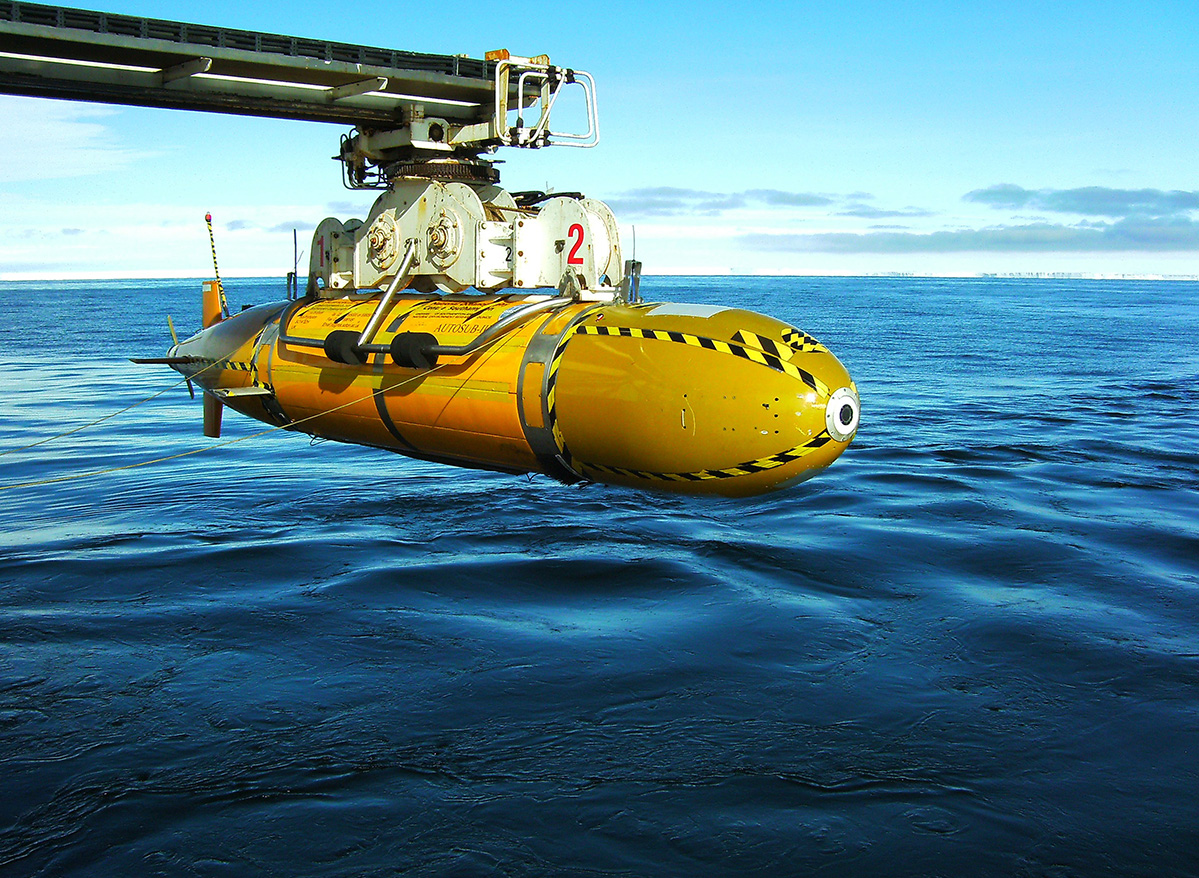 AUV особенно эффективны, когда они выполняют миссии, которые не могут быть достигнуты никакими другими средствами. Прекрасные примеры включают миссии Autosub, проводимые в Арктике и Антарктике с 1999 года по настоящее время, с длительными миссиями (более 24 часов), выполняемыми под морским льдом и под плавающими ледяными языками ледников. Пожалуй, самым ярким примером была кампания 2009 года в Западной Антарктике, где Autosub3 работал под плавающим ледяным языком ледника Пайн-Айленд толщиной от 500 до 1000 м, проникая в ледяную пещеру на расстояние до 60 км. Используя картографический сонар, направленный вверх и вниз, Autosub3 смог нанести на карту как лед выше, так и глубины морского дна под дорожкой AUV. Эти миссии были потенциально очень опасны для AUV, поскольку в отличие от миссий на открытой воде, где AUV может вернуться на поверхность в случае обнаружения неисправности, AUV с уровнем льда выше километра не имеет такой возможности.
AUV особенно эффективны, когда они выполняют миссии, которые не могут быть достигнуты никакими другими средствами. Прекрасные примеры включают миссии Autosub, проводимые в Арктике и Антарктике с 1999 года по настоящее время, с длительными миссиями (более 24 часов), выполняемыми под морским льдом и под плавающими ледяными языками ледников. Пожалуй, самым ярким примером была кампания 2009 года в Западной Антарктике, где Autosub3 работал под плавающим ледяным языком ледника Пайн-Айленд толщиной от 500 до 1000 м, проникая в ледяную пещеру на расстояние до 60 км. Используя картографический сонар, направленный вверх и вниз, Autosub3 смог нанести на карту как лед выше, так и глубины морского дна под дорожкой AUV. Эти миссии были потенциально очень опасны для AUV, поскольку в отличие от миссий на открытой воде, где AUV может вернуться на поверхность в случае обнаружения неисправности, AUV с уровнем льда выше километра не имеет такой возможности.